|
|
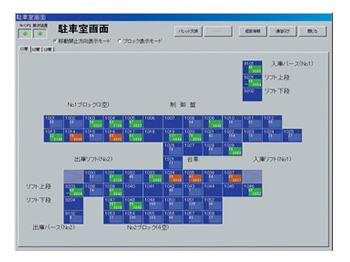
We developed a general-purpose control system for
large-volume mechanical parking systems. The
purposes of the control system are as follows:
1) Flexibly meet layout requirements including lift and
platform
2) Increase reliability in controlling the parking system
3) Increase throughput in loading and unloading cars
4) Support connectivity with network environments
To realize purposes 1) to 3), we developed a path
generator that automatically generates paths for
loading/unloading and recovering cars, and a task
arbitrator that controls simultaneous execution of
loading/unloading multiple cars, as general purpose
programs. These programs interact with an equipment
controller via the MELSECNET driver program. To realize
purpose 4), we built a structure in which communication
of information on tasks administered in the control
system, information on inventory and information on
reservations for unloading cars is established through
the network I/F program. This control system has
already been deployed in a number of mechanical
parking systems with varied layouts, and is stably
operating.
|
|