|
The duplex-grinding machine for silicon wafer developed by SHI
has achieved very accurate positioning of a tool tip at a scale
of several tens of nanometers as well as high positioning stiffness.
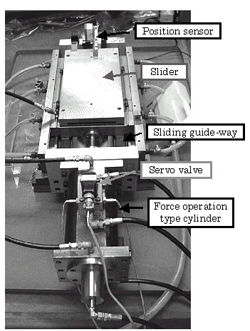
Our new positioning mechanism applied to the machine has adopted
double V-shaped groove sliding guideways and a force operation type
hydraulic actuator of high power and high resolution.
In the positioning mechanism where friction occurs, unstable phenomena
such stick-slip caused by nonlinear friction generally deteriorate
the accuracy of positioning. We have built the simulator of the
positioning mechanism developed by applying the empirical equation
that precisely states the friction characteristics. The simulator
is used to understand the positioning characteristics and to optimize
the mechanism and control systems.
This paper presents an outline of the simulator, the comparison
between the experimental and simulation results, and the simulation
performance, which has demonstrated an excellent nonlinear positioning
behavior under friction.
|